所谓 ”工预善其事,必先利其器“, BERT之所以取得这么惊才绝艳的效果,很大一部分原因源自于Transformer。为了后面更好、更快地理解BERT模型,这一节从Transformer的开山鼻祖说起,先来跟着”Attention is All You Need[1]“ 这篇文章,走近transformer的世界,在这里你再也看不到熟悉的CNN、RNN的影子,取而代之的是,你将看到Attention机制是如何被发挥的淋漓尽致、妙至毫颠,以及它何以从一个为CNN、RNN跑龙套的配角实现华丽逆袭。对于Bert来说,transformer真可谓天纵神兵,出匣自鸣!
看完本文,你大概能够:
- 掌握Encoder-Decoder框架
- 掌握残差网络
- 掌握BatchNormalization(批归一化)和LayerNormalization(层归一化)
- 掌握Position Embedding(位置编码)
当然,最重要的,你能了解Transformer的原理和代码实现。
Notes: 本文代码参考哈弗大学的The Annotated Transformer
Encoder-Decoder框架
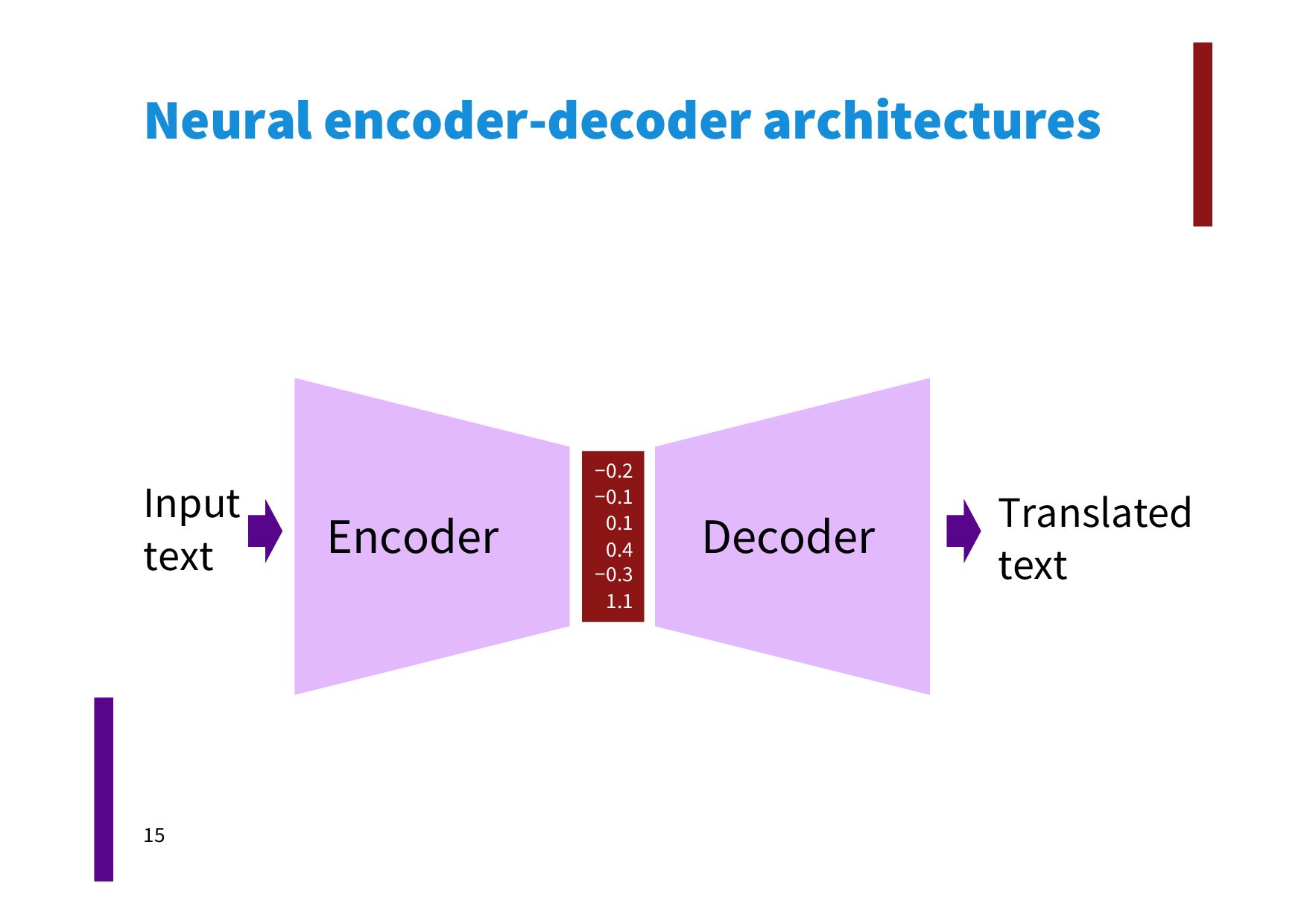
Encoder-Decoder是为seq2seq(序列到序列)量身打造的一个深度学习框架,在机器翻译、机器问答等领域有着广泛的应用。这是一个抽象的框架,由两个组件:Encoder(编码器)和Decoder(解码器)组成。对于给定的输入source , 首先编码器将其编码成一个中间表示向量。接着,解码器根据z和解码器自身前面的输出,来生成下一个单词(如Figure 1所示)。
1 | class EncoderDecoder(nn.Module): |
举个例子: 假如我们要将 ”knowledge is power“ 翻译成中文,在翻译”knowledge“这个单词时, 显然”knowledge“这个单词对翻译出来的”知识“贡献最大,其他两个单词贡献就很小了。这实际上让模型有个区分度,不会被无关的东西干扰到,翻译出来的准确度当然也就更高了。在这里Attention其实还是一个小弟,主角仍然是RNN、CNN这些大佬.
我们不妨先顺着这个思路往下想,attention在这里充当了Encoder和Decoder的一个桥梁,事实证明有很好的效果。既然效果这么好,那在Encoder中是不是也可以用呢?文本自身对自身的编码进行有区分度的表示,事实上,这在以往的很多文本分类的工作中已被采用[2]。这看上去已经是个值得尝试的good idea了。继续开脑洞,Encoder都用了,Decoder能落后吗,好歹人家是一对CP,当然要妇唱夫随了。于是,Encoder和Decoder都用了自注意力(self-attention)。
回想一下,到这里我们已经在三个地方用到了注意力机制了。这时候RNN大佬不愿意了,原本我的名声地盘都被你们分走了,散伙!Attention反正是初生牛犊不怕虎,说好,分分账分道扬镳吧,反正你的序列计算并行不起来一直让人诟病,没你我可能更潇洒。于是两兄弟就分开了。相见时难别亦难,RNN老大哥深谋远虑,临走时不忘嘱咐一句”苟富贵,勿相忘!“。于是一个故事的结束就成了另一个故事的开始,注意力就此开启创业之路,寒来暑往,春去秋来,在黑暗中不断寻找光亮,学习PPT技巧,终于有一天,它的PPT做完了,找到了融资,破茧成蝶,横空出道,并给自己取了个亮闪闪的名字:Transformer, 自此,一个新的时代开始了。
整体架构
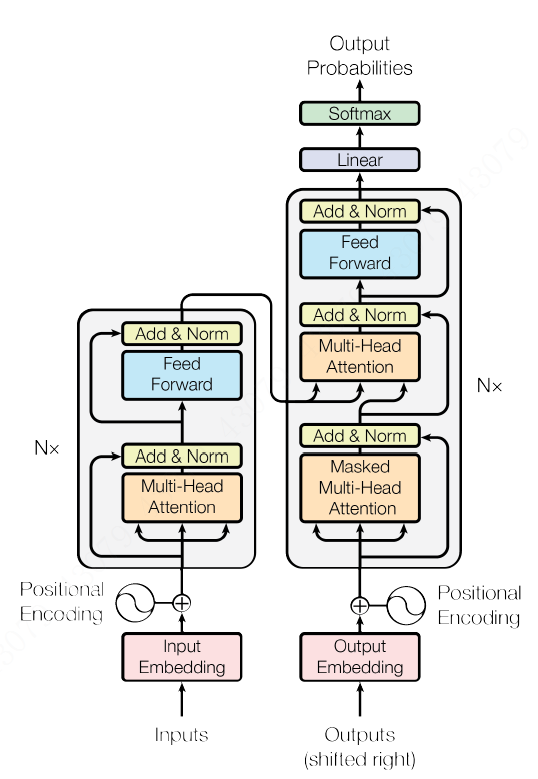
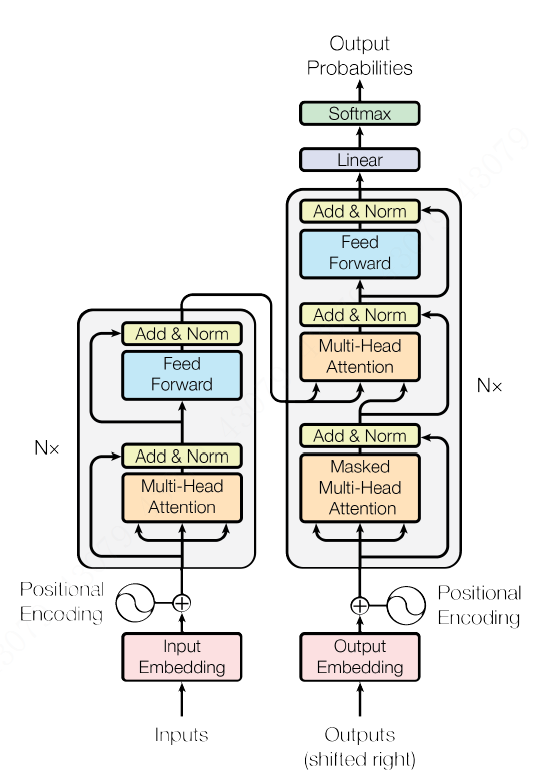
这部分我们来看看Transformer的架构。如Figure 2 所示, Transformer遵循了Encoder-Decoder的架构。在Encoder方面,6个编码器组件协同工作,组成一个大的编码器,解码器同样由6个解码器组件组成。我们先看Encoder。6个编码器组件依次排列,每个组件内部都是由一个多头attention加上一个前馈网络,attenion和前馈的输出都经过层归一化(LayerNormalization),并且都有各自的残差网络 。Decoder呢,组件的配置基本相同, 不同的是Decoder有两个多头attention机制,一个是其自身的mask自注意力机制,另一个则是从Encoder到Decoder的注意力机制,而且是Decoder内部先做一次attention后再接收Encoder的输出。
说完了Encoder和Decoder,再说说输入,模型的输入部分由词向量(embedding)经位置编码(positional Encoding)后输入到Encoder和Decoder。编码器的输出由一个线性层和softmax组成,将浮点数映射成具体的符号输出。
Encoder
我们先来看下Encoder的实现。
1 | class Encoder(nn.Module): |
以上便是Encoder的核心实现。它由N个encoderLayer组成。输入一次通过每个encoderLayer,然后经过一个归一化层。下面来看下encoderLayer和LayerNorm是什么样子。
EncoderLayer和残差网络
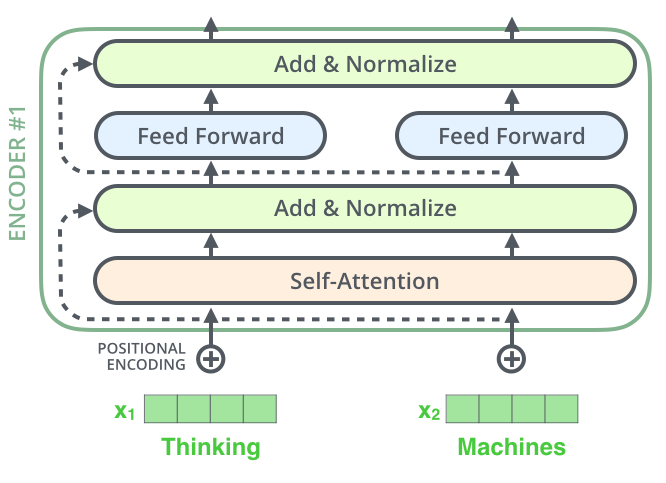
EncoderLayer如Figure 3所示。
1 | class EncoderLayer(nn.Module): |
1 | class SublayerConnection(nn.Module): |
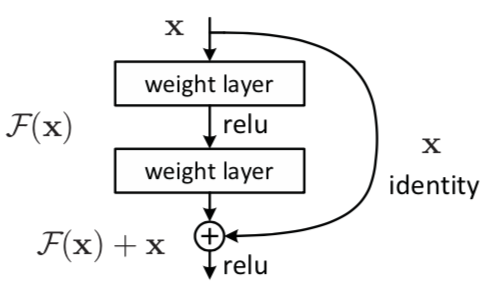
这里的代码初看上去有点绕,不过没关系,听我娓娓道来。我们先看什么是残差网络(即代码中的SublayerConnection),见Figure 4 。其实非常简单,就是在正常的前向传播基础上开一个绿色通道,这个通道里x可以无损通过。这样做的好处不言而喻,避免了梯度消失(求导时多了一个常数项)。最终的输出结果就等于绿色通道里的x加上sublayer层的前向传播结果。注意,这里输入进来的时候做了个norm归一化,关于norm我们后面再说。
让我们从输入x开始,再从头理一遍这个过程:
- 输入x
- x做一个层归一化: x1 = norm(x)
- 进入多头self-attention: x2 = self_attn(x1)
- 残差加成:x3 = x + x2
- 再做个层归一化:x4 = norm(x3)
- 经过前馈网络: x5 = feed_forward(x4)
- 残差加成: x6 = x3 + x5
- 输出x6
以上就是一个Encoder组件所做的全部工作了。里面有两点暂未说明,一个是多头attention, 另一个是层归一化。喝杯茶之后精彩继续。
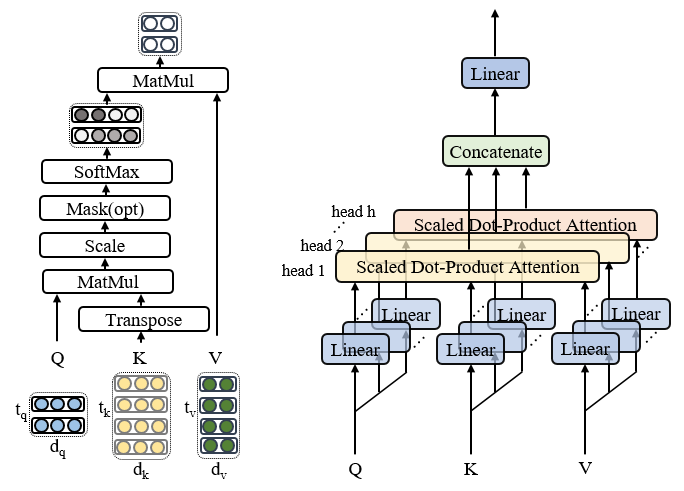
多头注意力机制
多头注意力机制在敝人之前的博客已经做了详尽的原理和代码解析(请戳),这里不再赘述,仅贴一下代码和注释,这里使用的是点乘attention,而不是加性(additive)attention。但是再提一点,在encoder和decoder的自注意力中,attention层的输入分为self_attn(x, x, x, mask)和self_attn(t, t, t, mask), 这里的x和t分别为source和target输入。后面会看到,从encoder到decoder层的注意力输入时attn(t, m, m), 这里的m是Encoder的输出。
1 | def attention(query, key, value, mask=None, dropout=None): |
1 | class MultiHeadedAttention(nn.Module): |
1 | def clones(module, N): |
注意下attention当中的mask。我们之前提到,在三个地方用到了attention。在Encoder的自注意力机制中,mask是用来过滤padding部分的作用,对于source中的每一个词来讲,其他的词对他都是可见的,都可以做出贡献的。但是在Decoder中,mask的作用就有所不同了。这可能又要从Encoder-Decoder框架说起。在这个框架下,解码器实际上可看成一个神经网络语言模型,预测的时候,target中的每一个单词是逐个生成的,当前词的生成依赖两方面:
- 一是Encoder的输出.
- 二是target的前面的单词.
例如,在生成第一个单词是,不仅依赖于Encoder的输出,还依赖于起始标志[CLS];生成第二个单词是,不仅依赖Encoder的输出,还依赖起始标志和第一个单词依此类推。这其实是说,在翻译当前词的时候,是看不到后面的要翻译的词。由上可以看出,这里的mask是动态的。
1 | def subsequent_mask(size): |
下面详细介绍下subsequent_mask是如何起作用的。函数的参数size指的是target句子的长度。以”[CLS] That is it“这个长度为4的target输入为例,这个函数的输出是什么呢?
1 | print(subsequent_mask(size=4)) |
可以看到,输出为一个下三角矩阵,维度为(1,4,4)。现在我们再来看下attention函数,mask起作用的地方是在Query和Key点乘后,结果矩阵的维度为(batch_size, heads, max_seq_len, max_seq_len)。为方便起见,我们只看一条数据,即batch_size=1。进入多头attention时,注意到对mask做了一步操作:
1 | mask = mask.unsqueeze(1) |
这时mask的维度变成了(1,1,4,4).
1 | target: |
写成了上面的样子,mask的作用就很显然了。例如,对于”CLS“来说,预测它下一个词时,只有”CLS“参与了attention,其他的词(相对于CLS为未来的词)都被mask_fill掉了,不起作用。后面的情况依此类推。
细心的小伙伴可能发现了,这里的解释并没有考虑padding部分。事实上,就算加了padding部分(为0),也不影响上述过程,有兴趣的话可以在上面it后面加上个0,下面的矩阵加一列[0 0 0 0 ], 就可以一目了然。
层归一化
1 | class LayerNorm(nn.Module): |
在前面多次用到了层归一化(LayerNormalization),那么它是何方神圣呢?或许你对BatchNormalization比较熟悉,但千万不要在这里错以为是它。可以说层归一化是BatchNormalization的2.0版本,它是由Hinton神和他的学生提出的[3]。
BatchNormalization
BatchNormalization的出现无疑是广大AI调参侠的福音,将大家从繁琐的权重初始化、学习率调节中释放出来。它不仅能够大大加快收敛速度,还自带正则化功能,是Google 2015年提出的[4]。
机器学习的一个重要的假设是:数据是独立同分布的。训练集合测试集的数据是同分布的,这样模型才有好的泛化效果。神经网络其实也是在学习这个分布。在这个假设前提下,一旦我们知道了(x,y)的联合分布,很多问题就能通过条件概率计算出来了。但是在实际训练过程中,数据经过前一个隐藏层向后一个隐藏层传播(线性+非线性运算),分布通常会发生变化(作者称之为Internal Covariate Shift),这会导致网络学习变慢。我们从两个方面来稍微理解一下这个问题。
一方面:我们现在只看两个隐藏层(隐藏层A和隐藏层B)之间的传播。第一轮,来自A的数据经过线性操作和激活函数后到达B,反向传播时,B层为了学习到这个分布(满足A的需求),调整了权重W1。接着又进行第二轮传播了,A数据一到B,A说,现在需求变了,要这样这样。B一脸懵,盘算了一下,发现前面的白学了,没办法,换个方向重来,就这样,A一直在变,B就得跟着变,来来回回磨合,这听起来就是个非常耗时的工作。就好比A说今天要吃汤圆,B和好了面粉,准备了调料,A又说我要吃饭,虽然在B的不懈努力下A最后能吃上饭,但如果一开始A就告诉B我要吃饭不是更快一点?,网络越深,这个问题就越严重。
另一方面则是与激活函数有关,我们用sigmoid为例来说明一下。假设两层传播之间可表示为
其中g是sigmoid函数,我们令
那么:
计算下梯度:
我们关注一下中间那一项,是sigmoid函数的导数,它的分布如Figure 5 所示,可见随着x不断增大,该项趋近于0,这也就意味着整个梯度趋近于0,进入饱和区了,导致的结果就是收敛变慢!要想加快收敛怎么办,把x拉到靠近0的位置就行了,这里导数值最大。

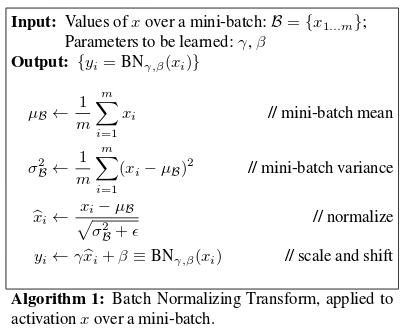
它的具体做法如Figure 6所示。对每一个Mini-Batch的所有样本的每一维特征,计算两个统计量:均值和方差,然后做一个归一化操作,这样就变成了正态分布了。但是只这样做也有问题,首先,谁说数据一定是正态分布的,偏正态不行吗?第二,把数据全部拉到接近0的位置,sigmoid不就接近于一个线性函数了吗,没有起到激活的作用啊(线性激活函数+线性操作等价于一层线性操作)。
上面说了一下训练过程。那么预测的时候呢?假如只预测一个样本,一个样本的均值…方差…怎么算?没意义是吧。事实上,预测的时候用的是全局的均值和方差,这个全局的均值和方差是怎么得到的呢?很简单,训练过程中记录下每个Mini-Batch的均值和方差,求个期望就是全局的均值和方差了。
LayerNormalization
BatchNormalization简直是个救世主啊,它令调参工作变得从未如此容易,让调参侠们不费吹灰之力,谈笑间到达收敛的彼岸。但毛主席曾经说过,万物都是辩证的,它同样存在两个问题:
-
对batch_size非常敏感。BatchNormalization的一个重要出发点是保持每层输入的数据同分布。回想下开始那个独立同分布的假设。假如取的batch_size很小,那显然有些Mini-Batch的数据分布就很可能与整个数据集的分布不一致了,又出现了那个问题,数据分布不一致,这就等于说没起到同分布的作用了,或者说同分布得不充分。实验也证明,batch_size取得大一点, 数据shuffle的好一点,BatchNormalization的效果就越好。
-
不能很方便地用于RNN。这其实是第一个问题的引申。我们再来看一下Figure 6中的均值和方差的计算公式。对所有样本求均值。对于图片这类等长的输入来说,这很容易操作,在每个维度加加除除就可以了,因为维度总是一致的。而对于不等长的文本来说,RNN中的每个time step共享了同一组权重。在应用BatchNormalization时,这就要求对每个time step的batch_size个输入计算一个均值和方差。那么问题就来了,假如有一个句子S非常长,那就意味着对S而言,总会有个time_step的batch_size为1,均值方差没意义,这就导致了BatchNormalization在RNN上无用武之地了。
为了避免这两个问题,LayerNormalization就应运而生了。
LayerNormalization的主要变化在于:
-
不再对Mini-Batch中的N的样本在各个维度做归一化,而是针对同一层的所有神经元做归一化。归一化公式为:
其中,H指的是一层神经网络的神经元个数。我们再回想下BatchNormalization,其实它是在每个神经元上对batch_size个数据做归一化,每个神经元的均值和方差均不相同。而LayerNormalization则是对所有神经元做一个归一化,这就跟batch_size无关了。哪怕batch_size为1,这里的均值和方差只和神经元的个数有关系(如果读到这里仍然感到不是特别清楚,再读两遍,还困惑也没关系,待会看Figure 7)。
-
测试的时候可以直接利用LN,所以训练时不用保存均值和方差,这节省了内存空间。
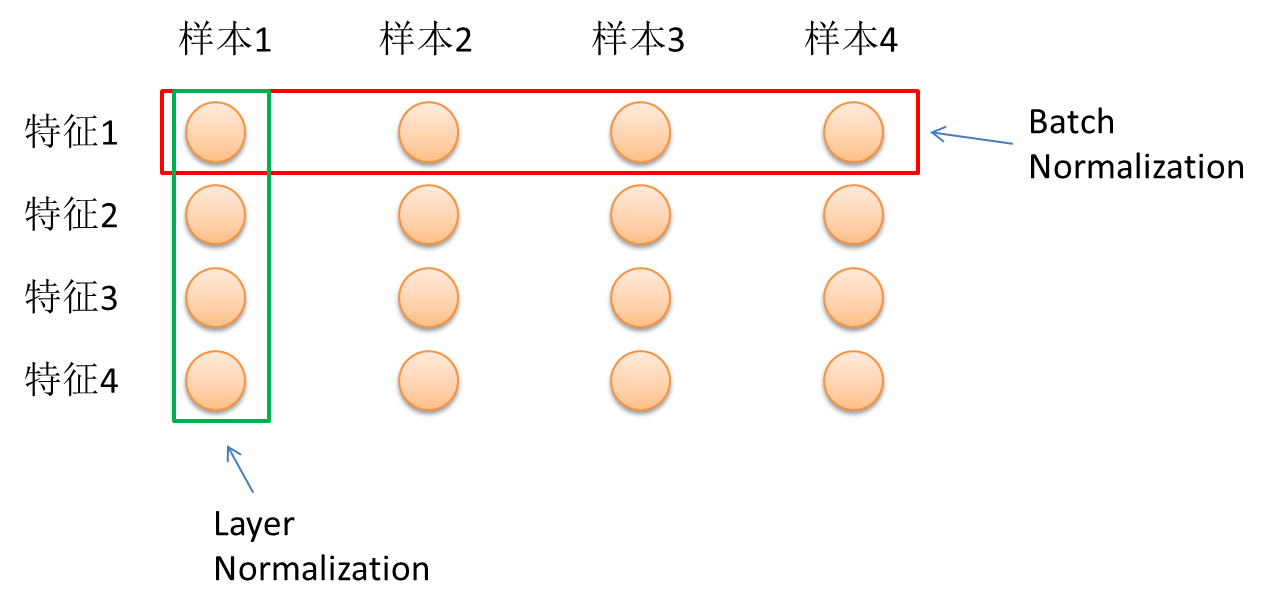
Figure 7示意了两种方式的区别。假设有N个样本,每个样本的特征维度为4,图中每个小圆代表一个特征,特征1,特征2等等,特征4。BatchNormalization是在N个同一特征(如特征1)上求均值和方差,这里要对每个特征求1次,共4次。对照一下上面说的,万一有个样本有5个特征,是不是就没法玩了。LayerNormalization呢,别的样本都和我没啥关系,有多少个特征我把这些特征求个均值方差就好了。这也就是为什么一个叫”批归一化“,另一个叫”层归一化“了。理解了这一点,也就理解了为什么Transformer中使用LN而不是BN。
回到层归一化的代码中,注意到这里的求均值和方差均是应用在x的最后一维上。这一维其实就是in_features,即神经元个数,同BN一样,这里也引入两个参数,参与训练。如果你想问这样做为什么也会有效,我愿意再次告诉你深度学习是个实验领先于理论的学科,当然,不排除某位数学大神能够看出两者之间存在某种等价性。
前馈网络
每个encoderLayer中,多头attention后会接一个前馈网络。这个前馈网络其实是两个全连接层,进行了如下操作:
1 | class PositionwiseFeedForward(nn.Module): |
这两层的作用等价于两个 kenerl_size=1的一维卷积操作。
词向量
这里就是普通的不能再普通的词向量,将词语变成d_model维的向量。
1 | class Embeddings(nn.Module): |
位置编码
由于Transformer没有用到CNN和RNN,因此,句子单词之间的位置信息就没有利用到。显然,这些信息对于翻译来说是非常有用的,同样一句话,每个单词的意思能够准确的翻译出来,但如果顺序不对,表达出来的意思就截然不同了。举个栗子感受一下,原句:”A man went through the Big Buddhist Temple“, 翻译成:”人过大佛寺“和”寺佛大过人“,意思就完全不同了。
那么如何表达一个序列的位置信息呢?对于某一个单词来说,他的位置信息主要有两个方面:一是绝对位置,二是相对位置。绝对位置决定了单词在一个序列中的第几个位置,相对位置决定了序列的流向。作者利用了正弦函数和余弦函数来进行位置编码:
其中pos是单词处于句子的第几个位置。我们来考察一下第一个公式,看是否每个位置都能得到一个唯一的值作为编码。为简单起见,不妨令i=0,那么:
我们反过来想,假如存在位置j和k的编码值相同,那么就有:
$i, j ij$
以上两式需要同时满足,可等价为:
$i, j ijk$为整数
同时成立,这就意味着:
这显然是不可能的,因为左边是个无理数(无限不循环小数),而右边是个有理数。通过反证法就证明了在这种表示下,每个位置确实有唯一的编码。
上面的讨论并未考虑i的作用。i决定了频率的大小,不同的i可以看成是不同的频率空间中的编码,是相互正交的,通过改变i的值,就能得到多维度的编码,类似于词向量的维度。这里(d_model), 一共512维。想象一下,当2i大于d_model时会出现什么情况,这时sin函数的周期会变得非常大,函数值会非常接近于0,这显然不是我们希望看到的,因为这样和词向量就不在一个量级了,位置编码的作用被削弱了。另外,值得注意的是,位置编码是不参与训练的,而词向量是参与训练的。作者通过实验发现,位置编码参与训练与否对最终的结果并无影响。
1 | class PositionalEncoding(nn.Module): |
之所以对奇偶位置分别编码,是因为编码前一个位置是可以由另一个位置线性表示的(公差为1的等差数列),在编码之后也希望能保留这种线性。我们以第1个位置和第k+1个位置为例,还是令i=0:
至此,我们就把Encoder部分的细节介绍完了,下面来看下Decoder部分
Deocder
我们先在看一眼刚开始的那张框架图。左半部分是Encoder,右半部分是Decoder。不难看出,Decoder和Encoder极其相似。
首先,Decoder也是由6个相同的decoder组件构成。
1 | class Decoder(nn.Module): |
每个组件长什么样子呢?首先输入经过词向量和位置编码,进入target的自注意力层,这里和Encoder一样,也是用了残差和层归一化。然后呢,这个输出再和Encoder的输出做一次context attention,相当于把上面的那层重复了一次,唯一不同的是,这次的attention有点不一样的,不再是自注意力,所有的技术细节都可以参照Encoder部分,这里不再复述。
1 | class DecoderLayer(nn.Module): |
线性层和softmax
这是整个模型的最后一步了。从Decoder拿到的输出是维度为(batch_size, max_seq_len, d_model)的浮点型张量,我们希望得到最终每个单词预测的结果,首先用一个线性层将d_model映射到vocab的维度,得到每个单词的可能性,然后送入softmax,找到最可能的单词。
线性层的参数个数为d_mode vocab_size, 一般来说,vocab_size会比较大,拿20000为例,那么只这层的参数就有个,约为10的8次方,非常惊人。而在词向量那一层,同样也是这个数值,所以,一种比较好的做法是将这两个全连接层的参数共享,会节省不少内存,而且效果也不会差。
1 | class Generator(nn.Module): |
结语
至此,整个Transformer模型的介绍就告一段落了,希望读者能够有所收获。以上恭疏短引,已竭鄙怀。请洒潘江,各倾陆海云尔!